介紹
此作業本是你學習F-15E地形跟隨雷達(Terrain Following Radar, TFR)的指導。它包含關於LANTIRN、TFR原理、TFR介面與TFR畫面的資訊。
課程參考標準1. 認識TFR掃描區域、指令邏輯、柔和與劇烈動作幅度引數。
2. 認識和/或辨別TFR顯示符號。
3. 給出TF頁面,辨別:
a) 飛機相對設定間距限制的飛行路徑。
b) 飛機相對顯示出的地形的飛行路徑。
c) 多山、平坦、無回波地形。
正文LANTIRN概覽F-15E地形跟隨能力導航吊艙包含一臺導航前視紅外,使機組能在夜間看見前方;一部地形跟隨雷達,其提供了手動與自動地形跟隨能力。此作業本中只提及了地形跟隨雷達邏輯與頁面,不過一定要認識到地形跟隨雷達操作時,地形跟隨雷達與導航紅外要一起使用,機組在多數時間都會看著紅外畫面,並跟隨HUD上的地形跟隨雷達符號指令。
地形跟隨雷達相關係統地形跟隨操作的主要相關係統有導航吊艙、 自動飛行控制系統(AFCS)、 雷達高度計、 多個AIU、中央計算機(Central Computer, CC)。地形跟隨計算機接收INS、地形跟隨雷達、雷達高度計的資訊,它隨後確定恰當的指令垂直G值。並在自動進行跟隨時將其傳送至自動飛行控制系統,或在手動地形跟隨時,以俯仰指令框顯示。CC在HUD、HUD復顯、ADI、地形跟隨頁面上顯示恰當的指引符號、注意與警告。
地形跟隨原理地形跟隨雷達系統的用途是掃描飛機前方的地形,決定其中哪一段會落在飛行路徑投影上,並生成爬升或下降指令以維持選定參考高度。選定參考高度又被稱為設定間距限制(即Set Clearance, SC)。此章節解釋了地形跟隨雷達掃描的性質與如何用雷達回波生成指引指令。
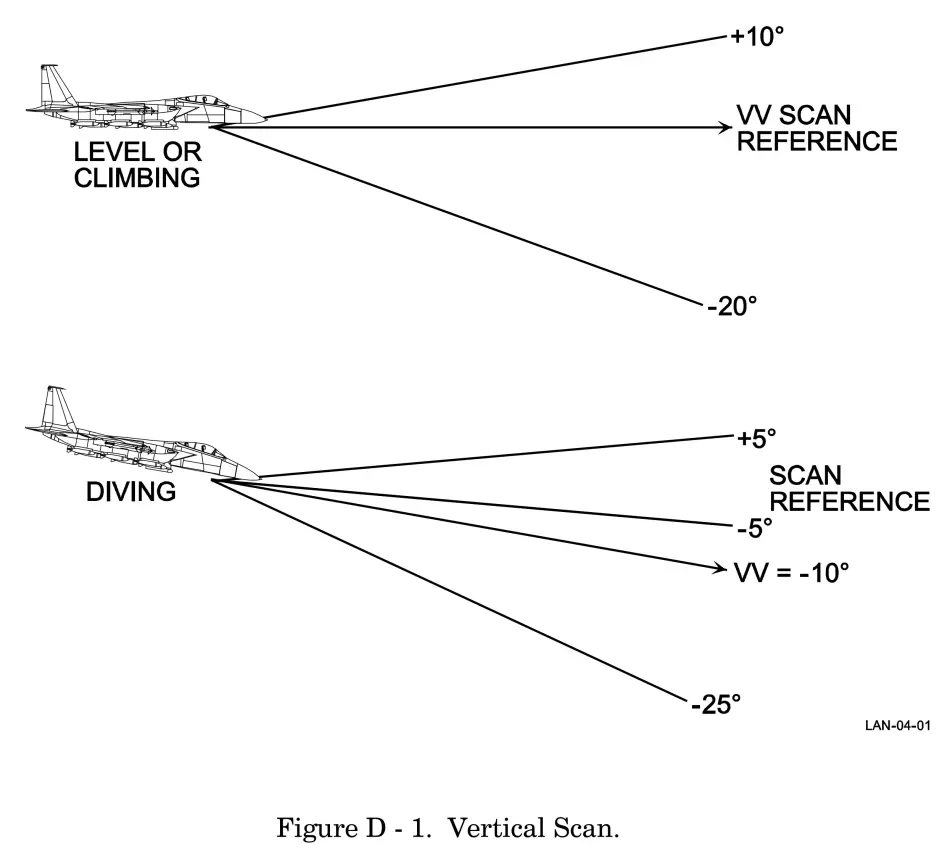
地形跟隨雷達掃描地形跟隨雷達掃描相對地面的垂直面與水平面(點頭與搖頭)。它使用5.5°的波束探測掃描範圍內的障礙。正常模式下,在平飛或爬升時,天線掃描相對速度向量的+10°~-20°。俯衝時則相對俯衝角的一半(圖D-1)。
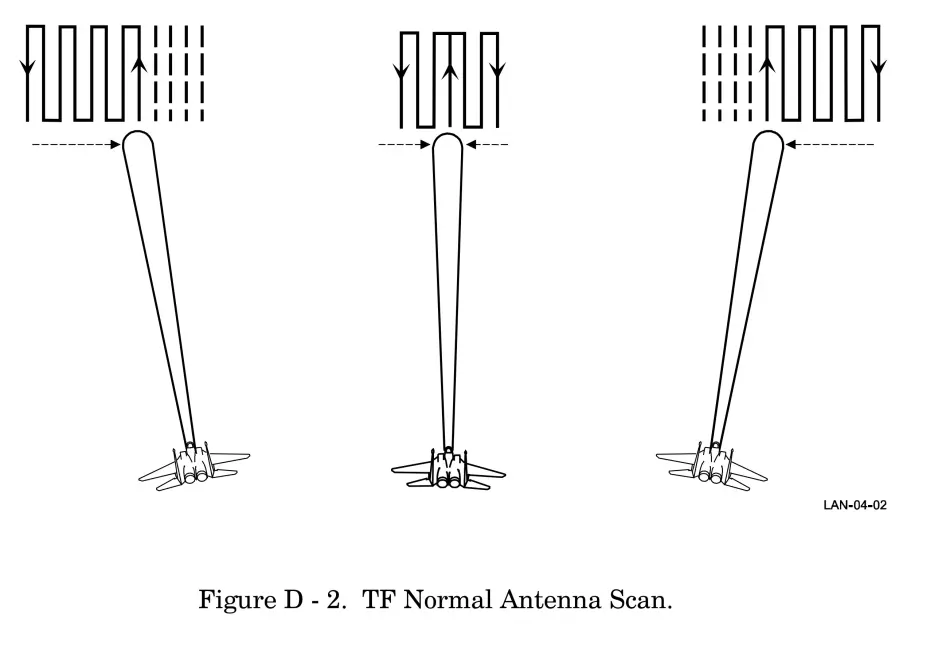
天線在8行的光柵中掃描左右各15°共30°的區域,飛機轉向時,地形跟隨雷達系統將掃描範圍移向轉向方向,達成“領先轉向”能力(圖D-2)。
地形跟隨雷達在一行掃描中探測到地形時,它會將回波的距離與俯仰角儲存在記憶體中。在下次掃這一行前它會使用INS提供的飛機地速與速度向量來預測地形的距離與俯仰角。完整掃完8行需要2.5秒。平飛時,中央那行會被掃描兩次,每1.25秒一次。
在特定地形跟隨雷達模式下,掃描範圍改變以提供不同能力。這些差異將在LAN-6中討論。
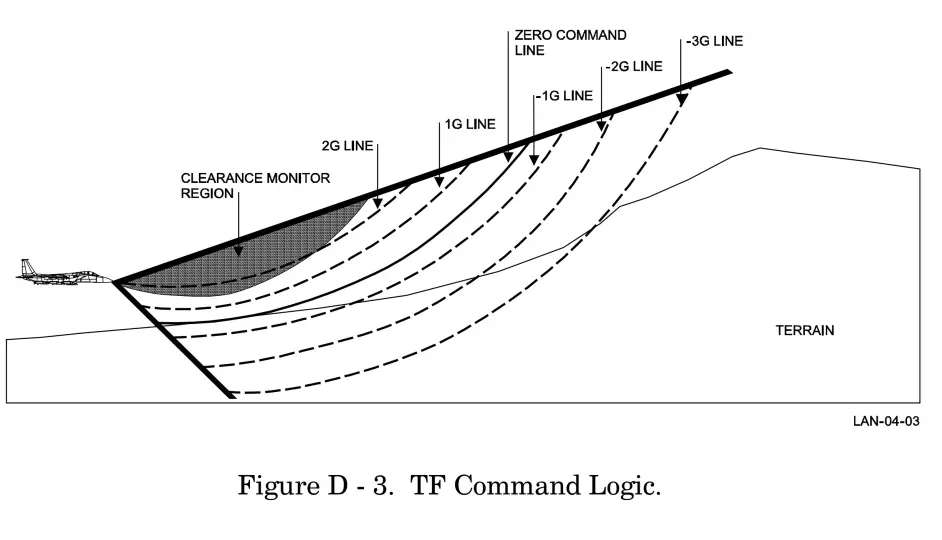
地形跟隨指令邏輯地形跟隨雷達儲存接收到的回波後,LANTIRN導航吊艙中的地形跟隨計算機會用其計算為維持SC所需要的指令G值。地形跟隨計算機會將儲存的地形資訊與“指令線”模型進行比較。這些線表示在SC處跨越障礙所需的G值增量。飛機飛躍圖D-3所示的平地時,地面的回波與零指令線(Zero Command Line, ZCL)貼合,代表為維持SC無需增加指令G值。
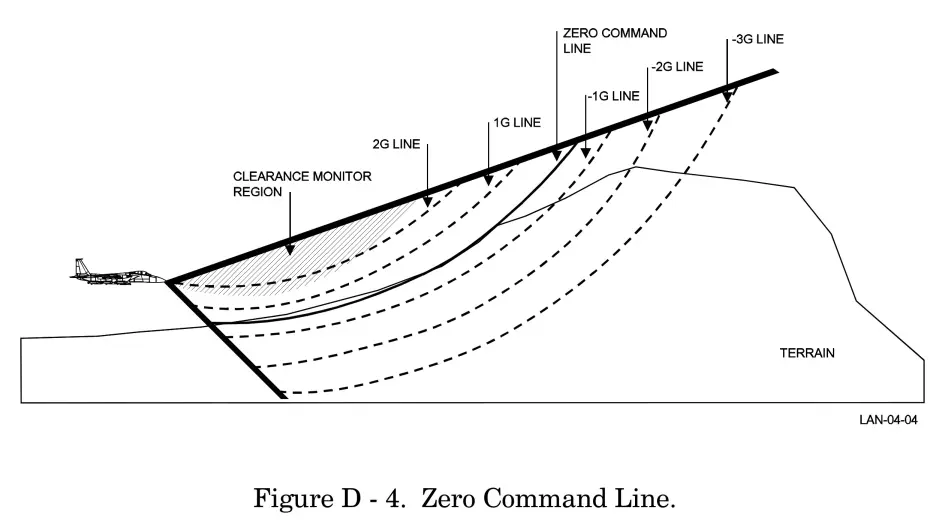
圖D-4中的山峰最終會穿越ZCL,代表為了維持SC,需要指令增加G值。地形穿越ZCL越多。指令G值增大的越多。如圖中+1G線和+2G線所示。飛機飛越山頂後,山背面的地形會進入負值區域,代表為維持SC需要指令下降。
間距監控區域是飛機前方一片由地形跟隨計算機監控的區域。任何進入該區域的物體都會使地形跟隨計算機生成拉昇指令。
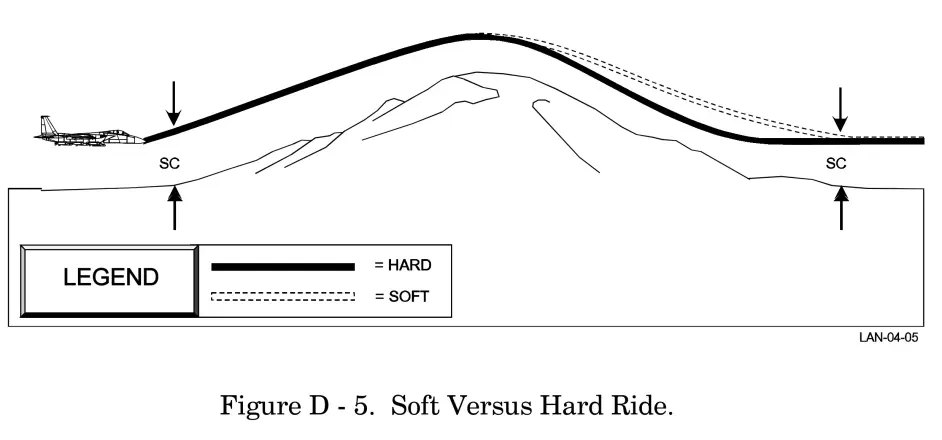
正G值限制為固定的2G增量,負G值限制則與機組選中的動作幅度有關。在劇烈幅度下,系統可提供最大為當前G-0.9的下降指令,柔和幅度則為當前G-0.45,所以柔和幅度的俯衝指令比劇烈幅度更和緩。圖D-5分別顯示了柔和與劇烈幅度的飛行路徑。此外,無論選中哪種動作幅度,系統只會指令最大12°的低頭。
指令線模型的“形狀”隨空速、SC與選中動作幅度的不同而變化,換言之,它是動態的。
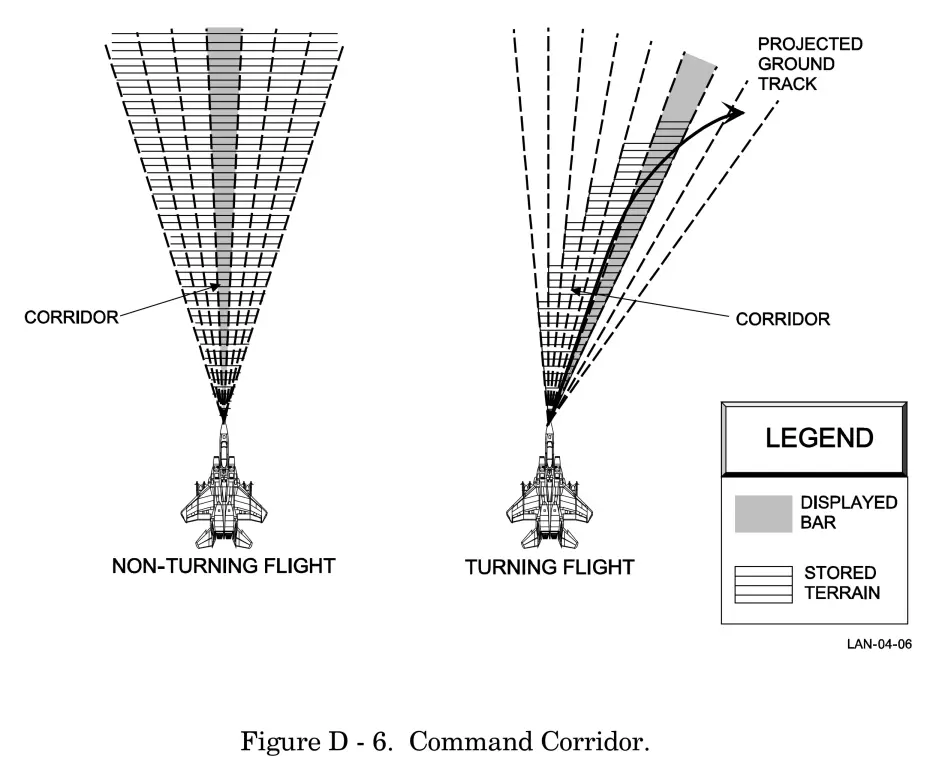
地形跟隨指令通道地形跟隨計算機儲存掃描中所有行的地形資訊,但不是所有資訊都對產生地形跟隨指令不可或缺。只有飛行路徑上的地形才需要爬升或下降指令。為防止飛機飛行路徑兩側的地形產生不必要的升降指令,地形跟隨計算機會根據飛機的地面路徑投影確定一條“指令通道”。
平飛時,指令通道僅包含中央行,飛機開始轉向時,指令通道移向轉向方向,囊括進其中部分或所有行。如圖D-6所示,囊括進的行數取決於地速與轉向率。地形跟隨計算機隨後根據指令通道的所有行的地形構成來生成指令。
雷達高度計指令
有的時候,如飛躍平坦的水面或鹽湖的時候,可能沒有地形跟隨雷達回波用於產生G值指令。此時“NO TERRAIN”注意將被顯示,地形跟隨計算機使用雷達高度計高度與SC進行比較來計算所需G值指令
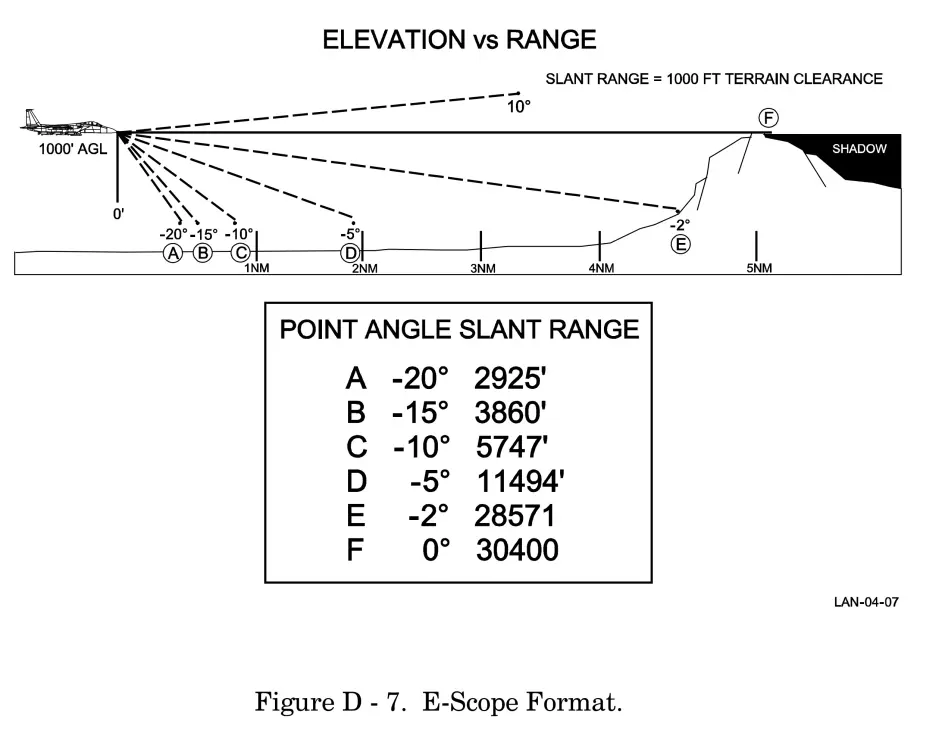
E顯(E-Scope)畫面顯示地形跟隨雷達回波的格式被稱為E顯。E顯頁面與對空雷達所用的B顯非常相似,但有兩大點不同:首先,E顯顯示距離—俯仰角,而非B顯的距離—方位角;其次,E顯中的距離標尺是非線性的。F-15E上的E顯可顯示最大10海里的距離,但前2海里佔據了螢幕上將近一半的位置。這種“距離拉伸”提供飛機近處地形的更多細節,因為這一片地形最有可能產生G值指令。
通過畫出範例中的回波可幫助理解E顯中的回波形狀,如圖D-7。圖中的飛機正以1000英尺離地高度飛行。且正接近一座1000英尺的山丘。假設飛機正在平飛,則地形跟隨雷達會掃描相對速度向量+10°~-20°的俯仰角。既然飛機與山丘間是平地,我們可以用簡單的三角學計算出掃描角度與斜距的對應關係。
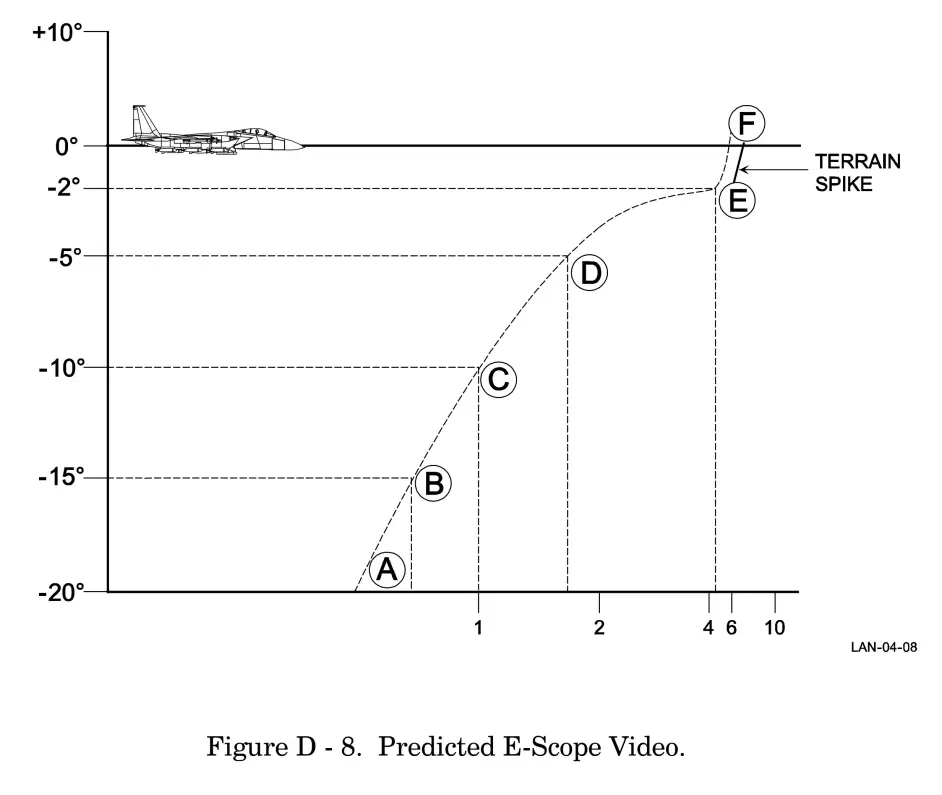
在圖D-8中,圖D-7的點與距離被繪製在E顯中,注意點F與點E的距離基本相同,但掃描角度不同,所以E顯中會出現一個“尖峰”。如果標出所有回波並連起來,你就能得到圖D-8所示的曲線。
地形跟隨頁面解讀
地形跟隨頁面有數項重要功能,其提供地形跟隨系統正常執行的總體置信度檢查,使機組能預見俯衝或爬升指令,可探測天氣或電子干擾。快速解讀它的能力對地形跟隨雷達的使用至關重要。此部分將討論地形跟隨頁面中的基本元素,以及它們如何與地形回波相關聯。
零指令線(Zero Command Line,ZCL)ZCL代表地形跟隨計算機在指令線模型中使用的零G值增量線(圖D-9)。
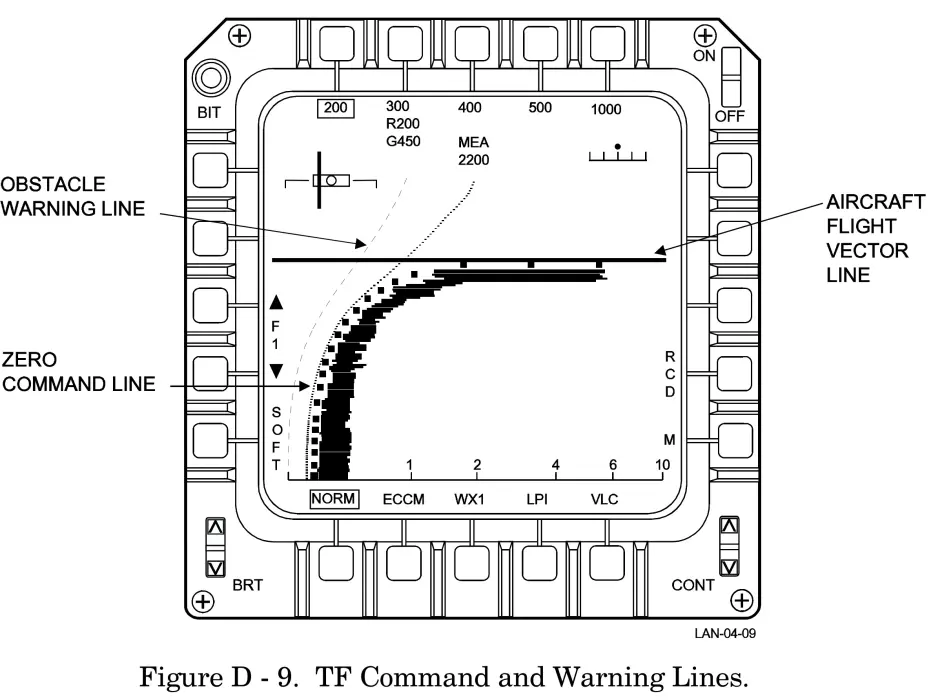
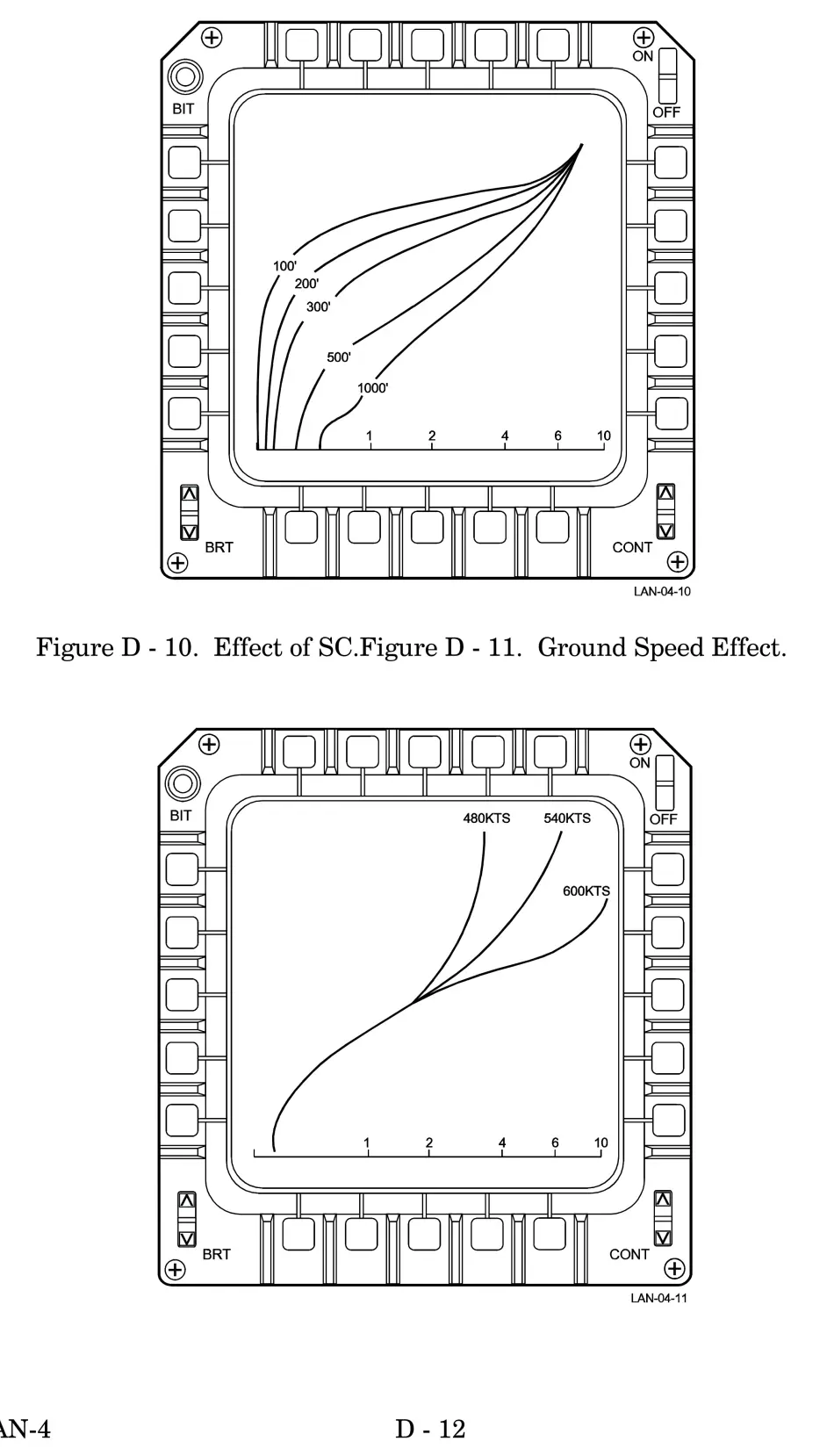
它顯示飛機相對SC的飛行位置。如果地面與ZCL貼合,即沿著ZCL從右向左移動,則飛機正處於對應距離的SC上,當前指令G值無需改變。如果地面在ZCL右側,則飛機過高,反之則過低。ZCL根據SC與地速動態變化(圖D-10和圖D-11)。
障礙警告線(Obstacle Warning Line, OWL)
此線位於ZCL左側(圖D-12)。它的用處是提醒前方地形需要增加2G才能越過(要記得2G是正常使用地形跟隨的最大值)。若合成視訊穿過此線,“OBSTACLE AHEAD”語音告警啟用,直到飛機爬升,地形回到OWL右側。
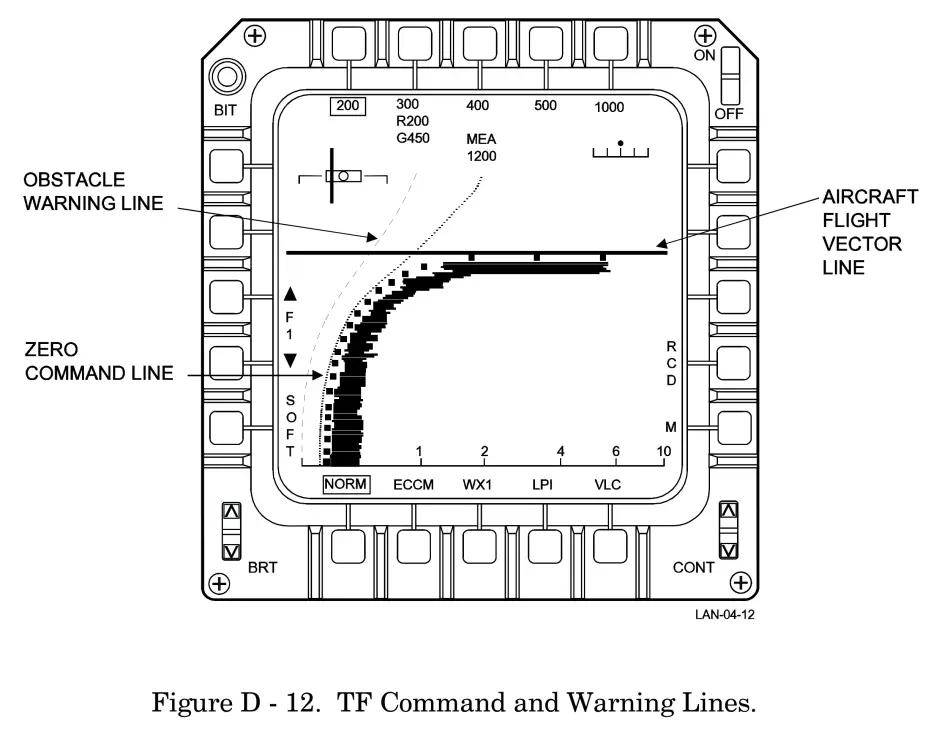
飛機飛行向量線
此線代表飛機飛行路徑(圖D-12)。飛機升降時,它會在頁面中上下移動,反映飛機動作。它提供飛機與地面的相對關係,就像HUD上的速度向量符,不過在地形跟隨頁面中,你還能確定飛行路徑在多遠的地方會與地面相交。地形跟隨爬升以越過高地時,可用飛行向量線迅速交叉檢查,確保地形跟隨指令會提供足夠地形間距。
TF原始視訊位置指示此指示位於地形跟隨頁面右上方(圖D-13)。標尺中的小球代表輸出原始視訊的掃描行所處的方位角。平飛時小球居中,指示原始視訊來自中間那行。轉向時則指示指令通道中的靠外幾行。可用原始視訊位置指示確認指令通道與領先轉向功能正常工作。飛機轉向時,小球應同向移動。
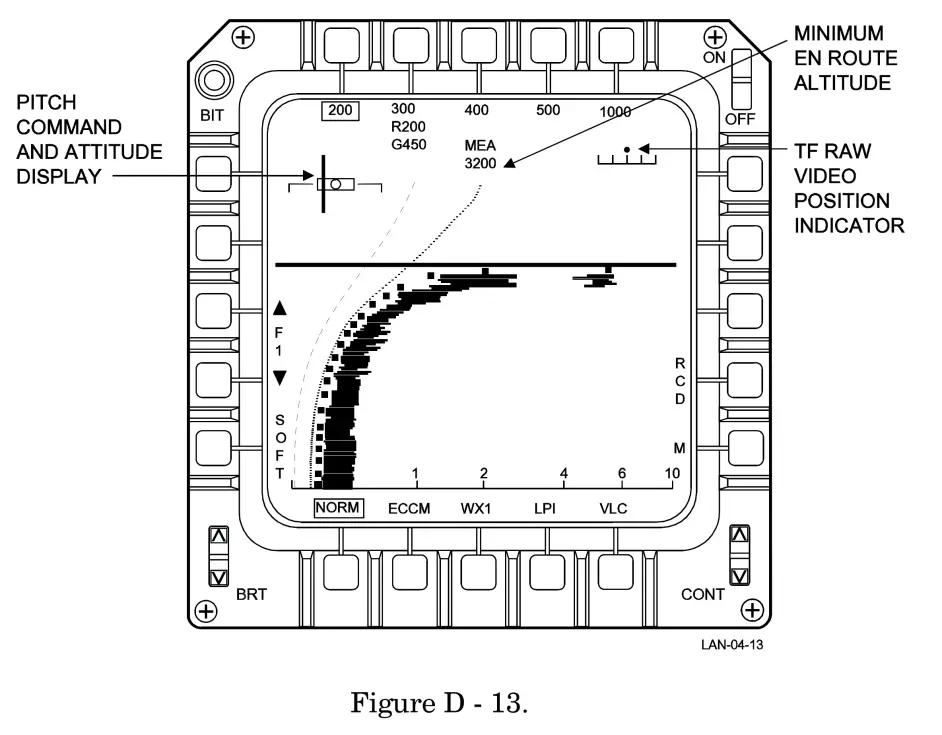
俯仰指令與姿態
指引指令與姿態顯示位於頁面左上方(圖D-13)。此處顯示人工地平線與地形跟隨指引框、自動地形跟隨實線、閃爍的ATF線(混合模式)這三者中的一個,取決於模式。小球代表速度向量相對指引線/框的位置。
最小途中高度(Minimum Altitude Enroute,MEA)進行地形跟隨時,MEA永遠顯示在E顯頁面中。MEA值可以設定為400~30000英尺,精確到個位。可使用UFC或通過AFMSS(空軍任務支援系統)將其載入MC/DTM。未在點資料子選單輸入MEA值時,MEA清零,地形跟隨頁面中顯示MEA OFF。顯示的MEA是當前飛機序列點的MEA。
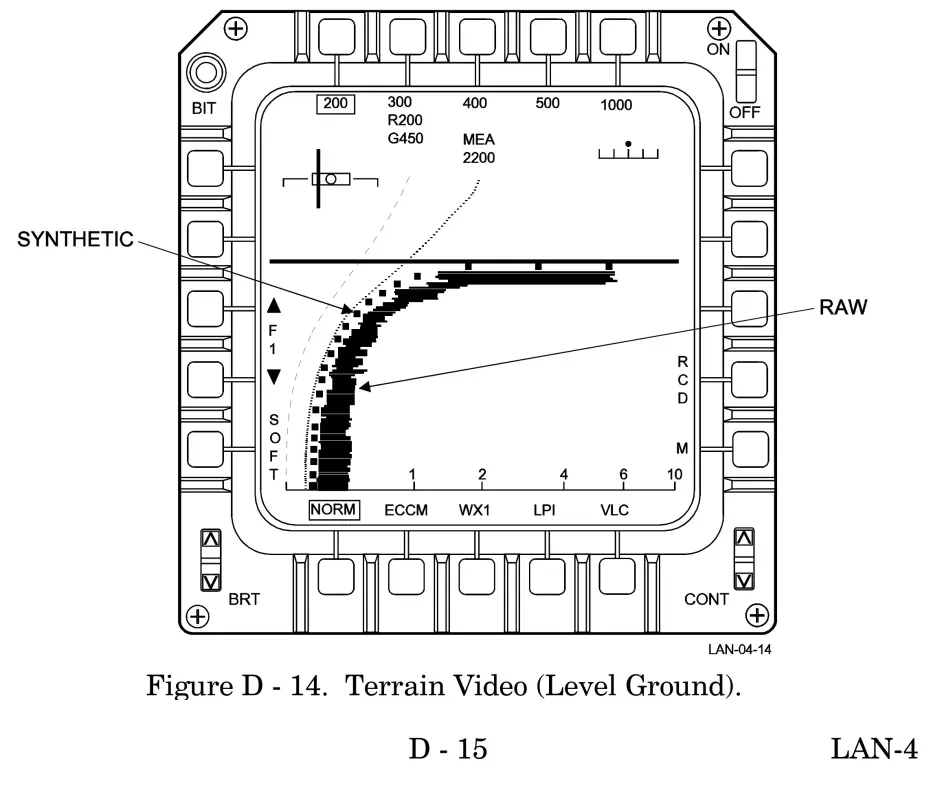
地形視訊頁面中有兩種地形視訊:合成視訊與原始視訊。合成視訊由地形跟隨計算機儲存,可最遠顯示6海里,以全亮度顯示。如圖D-14,其包括飛行路徑投影沿途的地形資料,每秒更新一次,所有地形跟隨指令都基於此視訊生成。原始視訊以半亮度顯示,最遠顯示10海里.原始回波平飛時每1.25秒更新一次。轉向時每2.5秒更新一次。可用原始視訊檢查地形跟隨雷達是否正常工作,還可用其探測天氣與干擾。原始視訊僅來自掃描中的一行,平飛時為中央行,轉向時則為外側行。
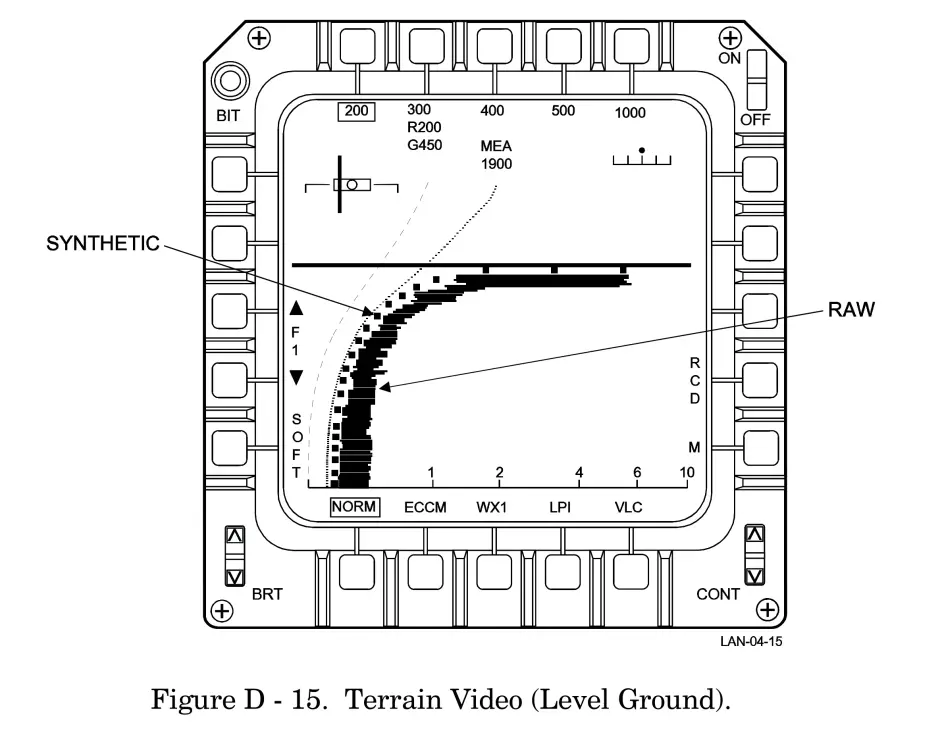
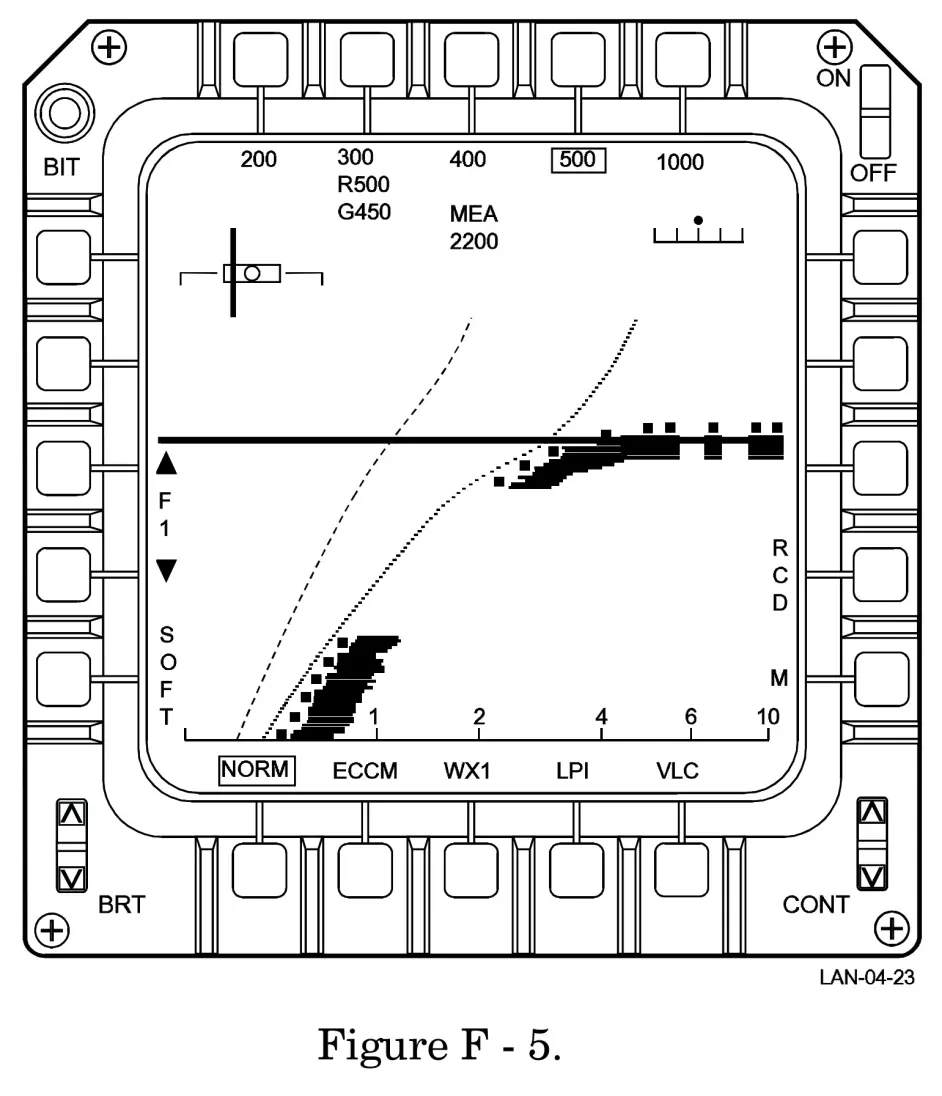
在平地上方時,如圖D-15所示,回波曲線在左下方陡峭,往右延伸時漸趨平緩。平地的辨認相對簡單。只要ZCL貼著視訊,飛機就在正確的SC上。
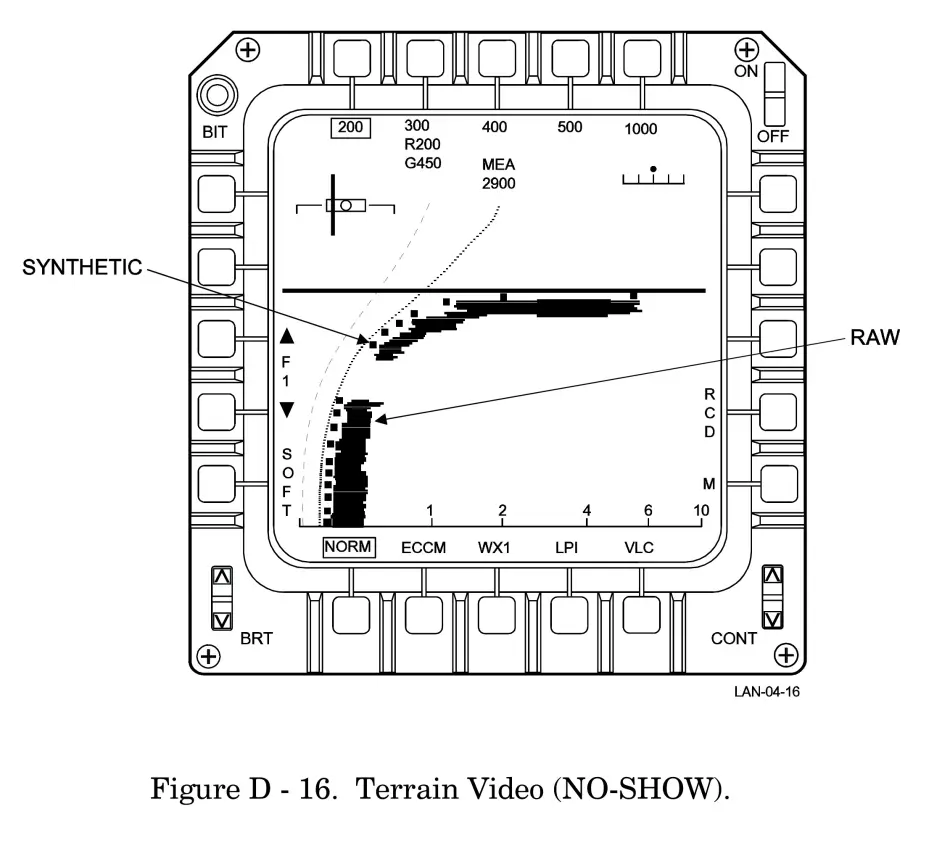
不同地形特徵產生不同畫面。湖泊、沙丘、雪地或其它低反射性地形在地形跟隨頁面中偶爾會以無回波區域出現(圖D-16)。可注意到,若將視訊延伸過無回波區域,可連成一條連續的光滑曲線,與平地類似。
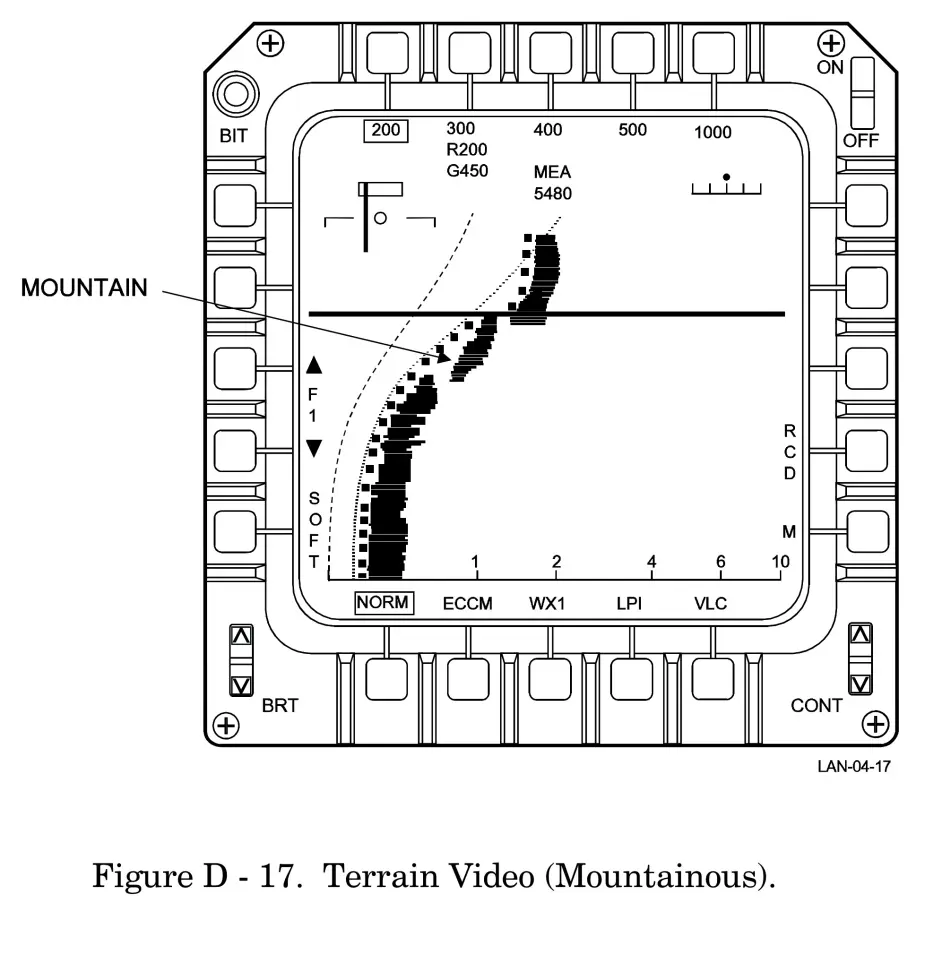
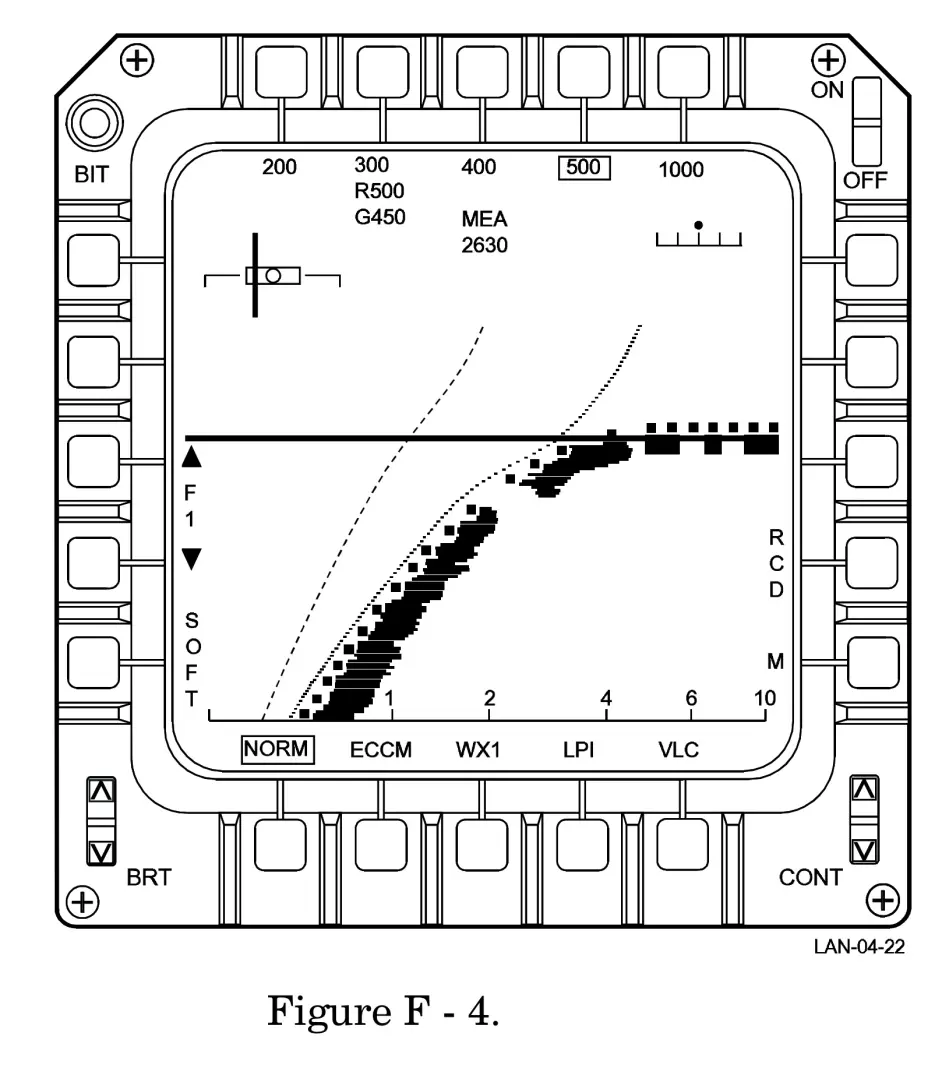
崎嶇地形或山丘在視訊中表現為尖峰。如果是山丘,尖峰後方還會跟著陰影(空白區域)。山丘後方的地形會在視線的角度上產生回波(圖D-17)。山谷在頁面中產生陰影,但回波顯示在更低更遠處。
從實際的角度來看,隨著地形改變,地形跟隨頁面會產生一系列尖峰與陰影,若地面回波、山丘、峽谷或平地貼著ZCL,你就在正確的高度上。如果回波穿過ZCL,預計指令爬升。如果回波在ZCL右側,預計指令下降。如果回波已穿過ZCL,且正快速靠近OWL,預計回撥穿過OWL時,指令拉昇。你可以用速度向量來確定若一切不動,飛行路徑會在哪個點與地面相交。
手動,自動與混合地形跟隨機組可選擇使用手動、自動或混合地形跟隨來跟隨地形跟隨雷達指引指令。使用手動地形跟隨時,飛行員通過將速度向量置於手動地形跟隨框(MTF框)中央來手動跟隨指引指令飛行。使用自動地形跟隨時,地形跟隨系統與自動駕駛接合,AFCS跟隨指引符號飛行。在耦合高度保持與地形跟隨模式(混合模式)中,機組指定一個維持的高度(雷達氣壓都行),直到地形進入地形跟隨最小限制,此時自動地形跟隨接管,直到越過障礙,飛機隨後返回預設雷達或氣壓高度。
手動地形跟隨的使用可在預備和非預備的條件下進行。預備手動提供防故障保護,在系統故障或不安全情況下自動升高,遠離地面。非預備手動提供拉昇符號,但不會自動爬升。
自動地形跟隨時自動拉昇保護保持開啟,也會自動爬升遠離地面。防故障拉昇與地形跟隨使用將在LAN-6與LAN-7中討論。
地形跟隨雷達介面顯示交叉檢查地形跟隨雷達資訊顯示在HUD、HUD復顯、ADI、地形跟隨頁面上。HUD是使用地形跟隨的主要顯示。導航紅外視訊與地形跟隨雷達指引指令一起顯示,使飛行員得以更好地感知地形跟隨環境與地形遮蔽,從而使戰術能更靈活。雖然可以使用UFC更改SC,不過,地形跟隨頁面才是地形跟隨引數控制的最佳源,它還能用來幫助辨認地形與地形跟隨飛行中所需的飛行路徑修正。ADI在HUD姿態資訊難以辨別,如從躍升機動中改出時特別有用。
系統介面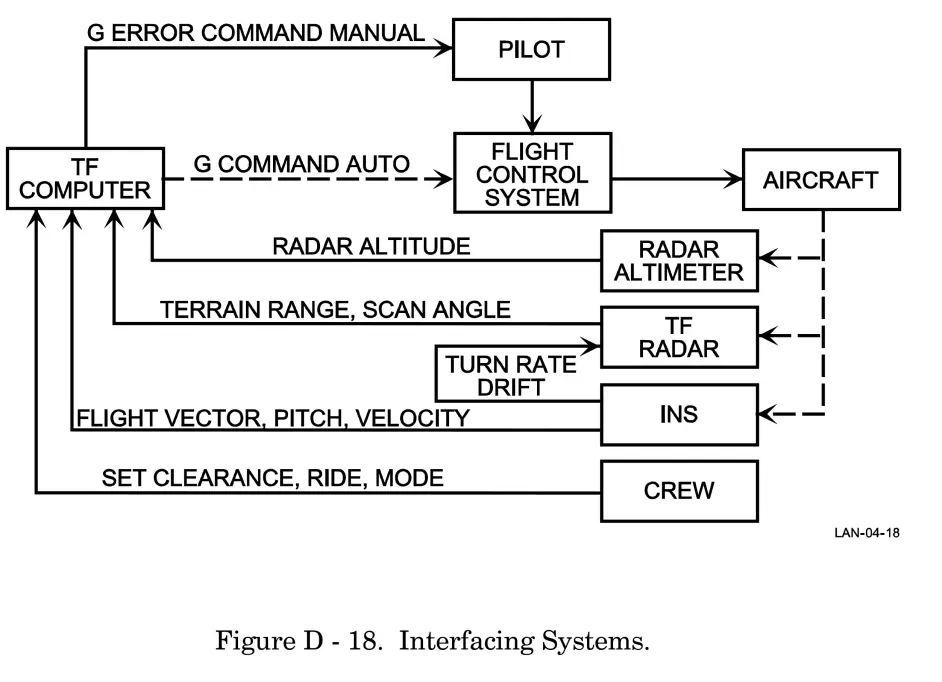
地形跟隨計算機
地形跟隨計算機接收INS、地形跟隨雷達、雷達高度計的資訊。以確定維持設定間距所需的合適的垂直G值指令。此值在自動地形跟隨時用於向AFCS提供G值指令,或在手動地形跟隨時提供俯仰指引。
CC/MPDPCC生成對應指引符號、注意與警告。MPDP驅動顯示器,並在手動地形跟隨時作為CC控制多路複用匯流排資訊的備份。
FCC允許預備地形跟隨(手動或自動)的連線、斷開與中斷。FCC控制基本CAS作動器與感測器執行,並對進入 AFCS的訊號作出迴應。這些訊號包括地形跟隨接合、啟用拉昇、雷達高度計超控開關位置。此外,FCC還進行監控功能,包括低高度監控(LAM)、飛行路徑角度監控(FPAM)與空速監控。FCC還是自動與預備手動地形跟隨雷達時拉昇指令的源。拉昇將在LAN-6中深入討論。
慣性導航系統(INS)INS資料必須有效才能正常使用地形跟隨。被提供並用作對比的資料有:垂直速率、俯仰姿態與滾轉姿態。如果這組資料都無效,則後續的拉昇指令將使用AHRS姿態作為參考。
雷達高度計導航吊艙使用雷達高度計在地形跟隨雷達看不見地面時獲取高度與距離資訊。各個AIU將雷達高度計的資訊傳到地形跟隨計算機與FCC。小於等於500英尺時,兩個AIU的資料都必須有效。FCC的地形跟隨邏輯與低高度監控系統使用兩個AIU中低的那一個。若在SC小於500英尺的情況下,兩個高度的差值大於30英尺。此雷達高度被認為無效並導致拉昇。
進行手動或自動地形跟隨飛行時所使用的資訊來自多個子系統,對這些系統如何相連有個大體瞭解會有幫助。但對 地形跟隨原理及E顯的顯示與辨別的深刻理解,才是安全使用地形跟隨的基石。
課後練習1. 平飛時,8行掃描正常會覆蓋左右各____。
a) 10°
b) 15°
c) 20°
d) 30°
2. 地形跟隨雷達提供的垂直指引符代表_____。
a) 維持SC所需的G值增量
b) HUD中飛行向量的位置
c) 代表OWL線的影象
d) 地形跟隨雷達警告的位置
3. 正常使用地形跟隨時,其使用的指令模型可使用最大____的G值增量。
a) +4G
b) +3G
c) +2G
d) +1G
4. 正常使用地形跟隨時,需要雷達高度計是因為___。
a) LAWS是唯一使用雷達高度計的系統
b) 地形跟隨雷達不提供升降指令時,雷達高度計執行這項功能
c) 雷達高度期要用來計算斜距
d) 其負責特定地形跟隨注意
5. 地形跟隨雷達領先轉向能力。
a) 使用雷達回波而不移動掃描範圍
b) 將掃描範圍移向轉向的方向
c) 與看向轉向相同。
d) 僅可由前座用HOTAS控制
6. 根據下圖回答問題,圖中顯示的是哪種地形?
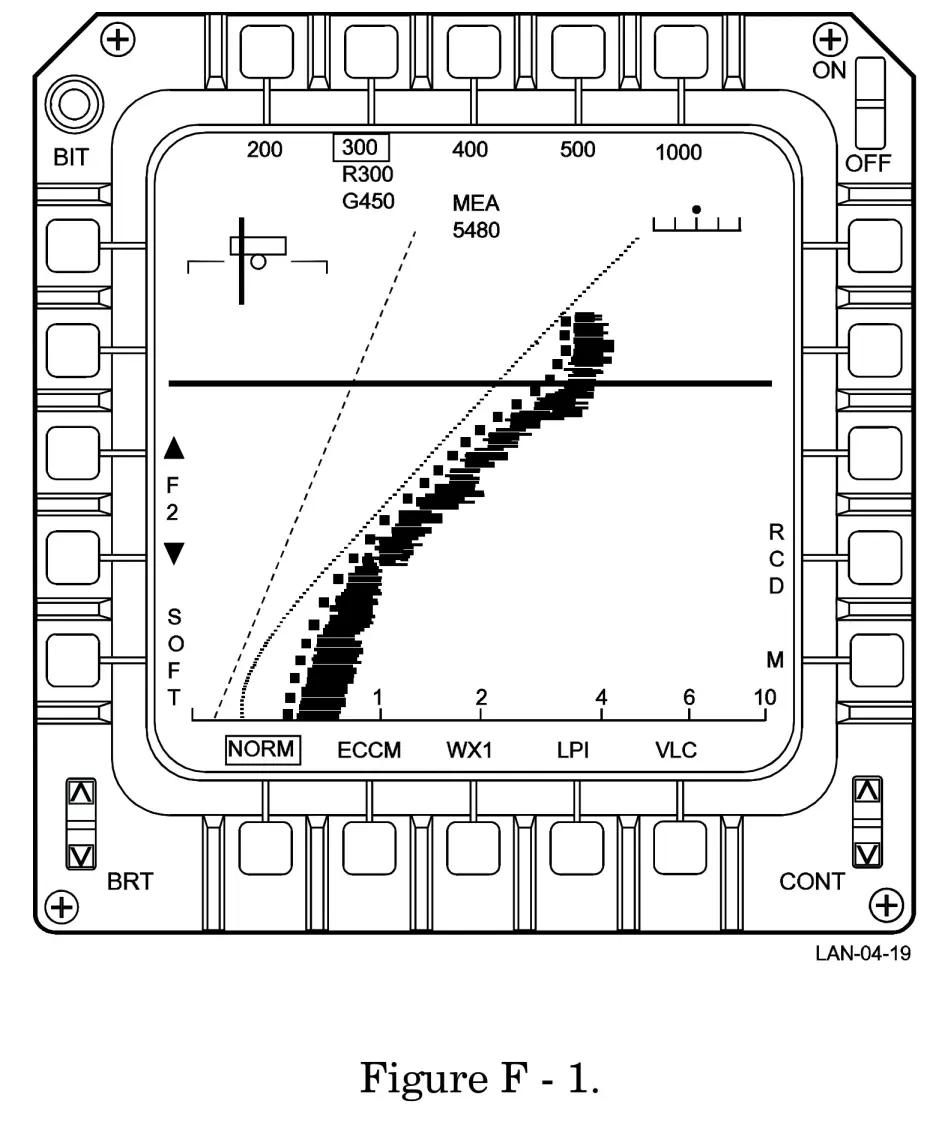
a) 平地
b) 水體
c) 多山
d) 沙漠
7. 根據下圖回答問題,圖中顯示的是哪種地形?
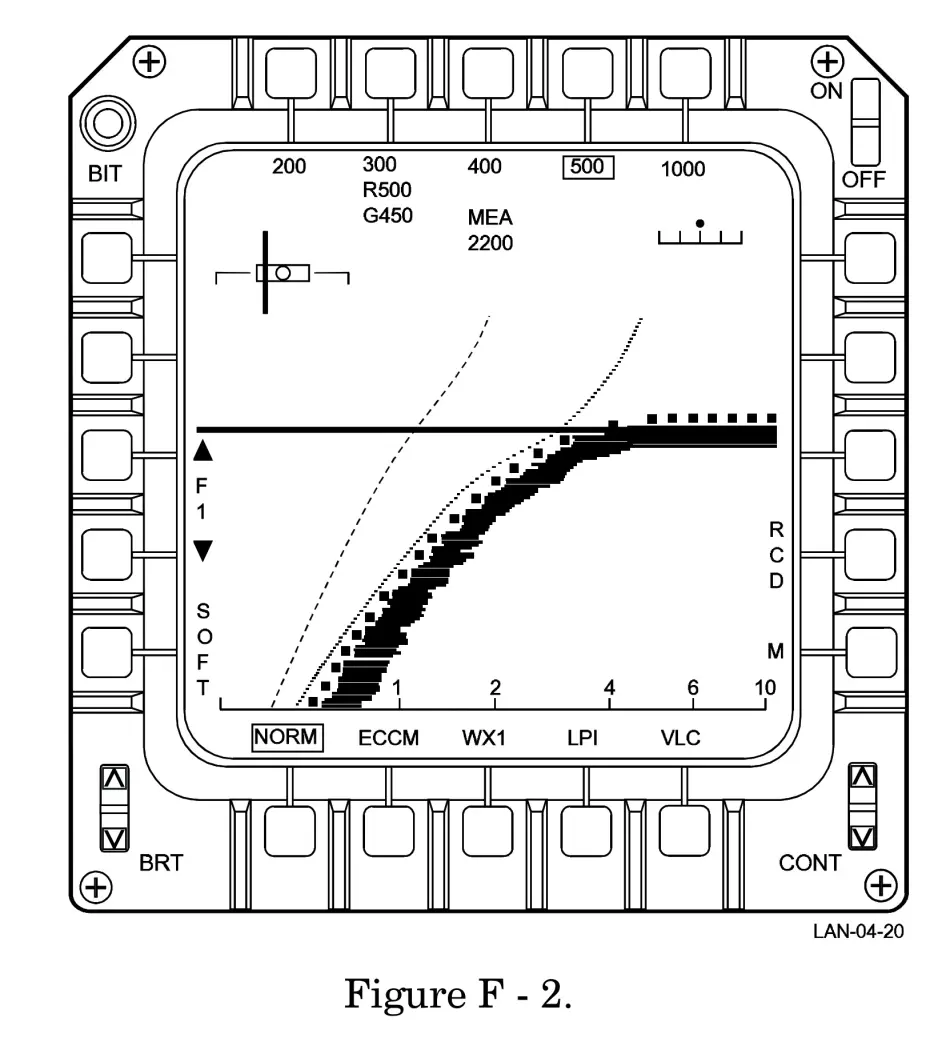
a) 平地
b) 崎嶇
c) 多山
d) 多石
8. 根據下圖回答問題,飛機___設定間距限制。
a) 高於
b) 低於
c) 處於
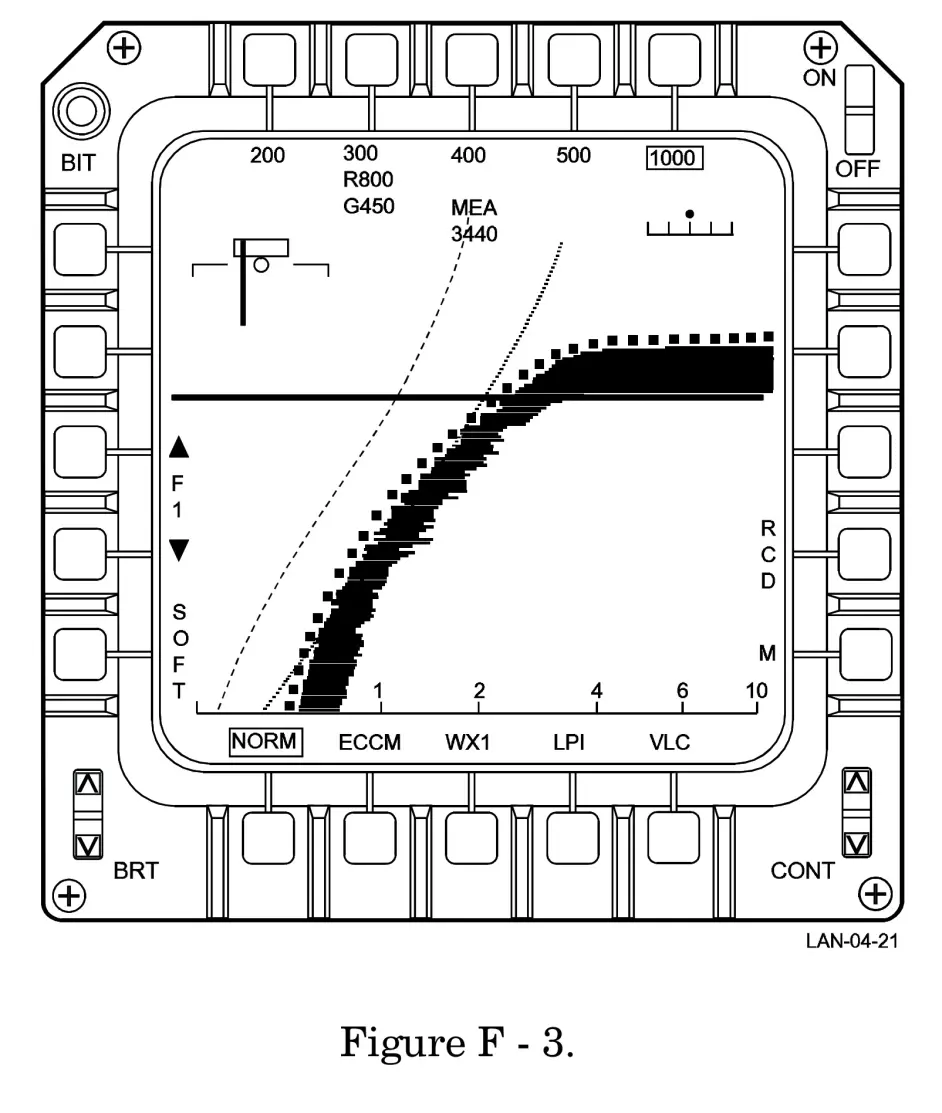
9. 根據下圖回答問題,圖中顯示的是哪種地形?
a) 平地
b) 崎嶇
c) 多山
d) 無回波
10. 根據下圖回答問題,圖中顯示的是哪種地形?
11. 與柔和幅度相比,劇烈動作幅度產生___的俯衝指令。
a) 更激進
b) 更不激進
c) 不比前者更激進